【slam】运行aloam项目过程记录
主要参考:
https://blog.csdn.net/abanchao/article/details/123558717
https://blog.csdn.net/qq_21043585/article/details/129785570?spm=1001.2014.3001.5502
ubuntu下使用不同版本的c++编译器的方法:
https://blog.csdn.net/qq_39779233/article/details/105124478
过程
- 在安装ceres库的时候遇到了一些c++编译的问题,找了许多博客都没有解决
https://blog.csdn.net/qq_39779233/article/details/139396438
https://blog.csdn.net/little_white138/article/details/142443296
最后放弃,按照教程上的步骤从头开始重新安装一遍ceres,居然就成功了。。 - 安装aloam的时候不需要编译,后面在执行catkin_make命令的时候会自动编译aloam
- 解决关于pcl库版本的报错:
(修改cmakelist.txt的内容)https://blog.csdn.net/z15f34/article/details/124792766 - 注意项目的结构
解压aloam后,应该把文件夹里的内容直接放在catkin_make/src中 - 执行roslaunch命令的时候终端位置无所谓,在aloam/catkin_ws中就可以了
执行rosbag play的时候终端应该处在rosbag文件所在的目录下 - catkin_make -> source devel/setup.bash -> roslaunch
前面两个命令是必须的,直接roslaunch会报错,提示找不到命令中的launch文件
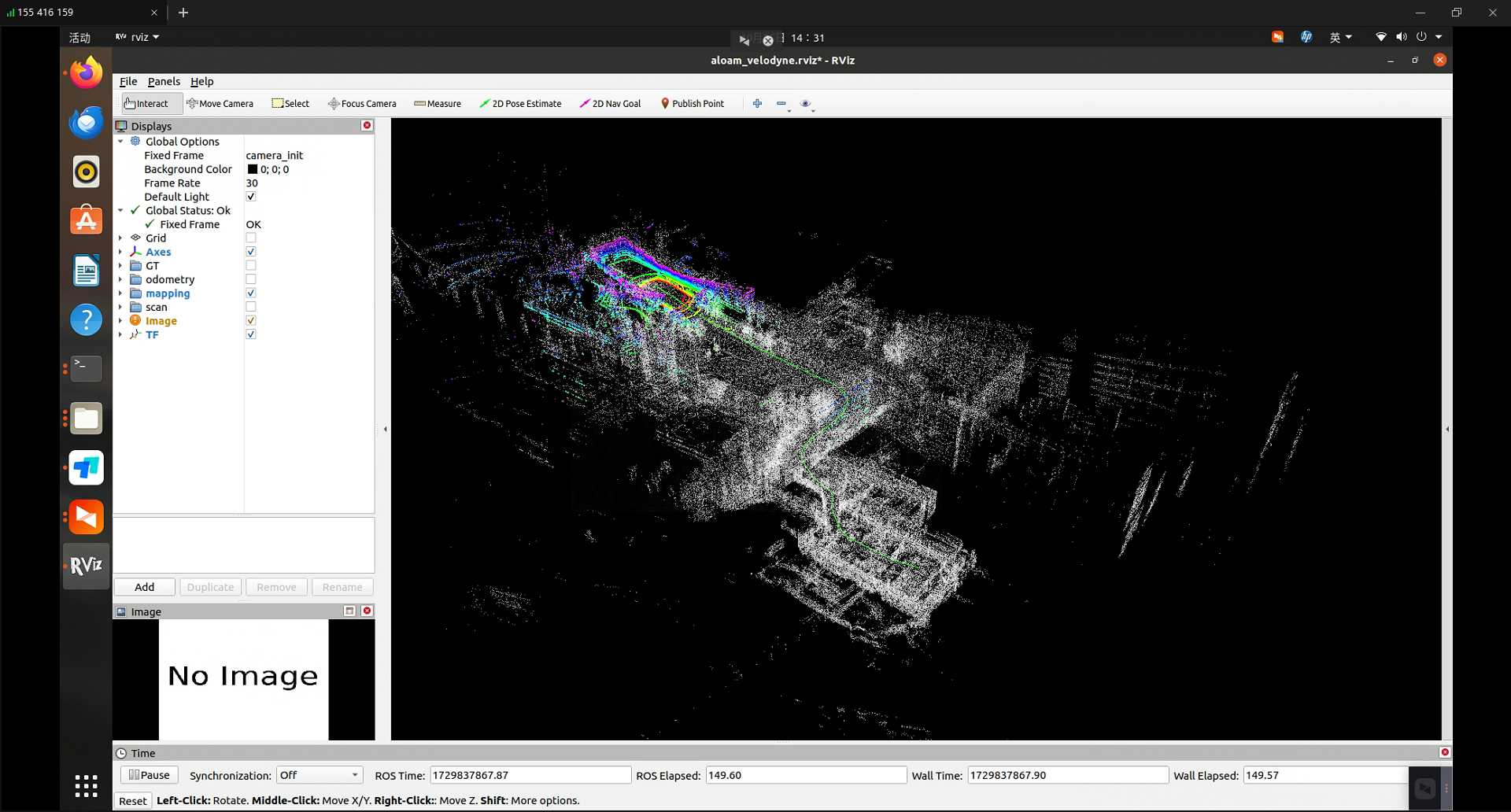
结果
后续
- 如何根据点云文件(如kitti数据集)创建rosbag文件
- 看一下aloam算法的论文
- 如何运行其他类型的rosbag文件